也是非常荣幸能评测 beetle RP2350 啊,板子到手第一感觉就是非常迷你,只有一个硬币大小,很符合其嵌入式穿戴设备的定位。
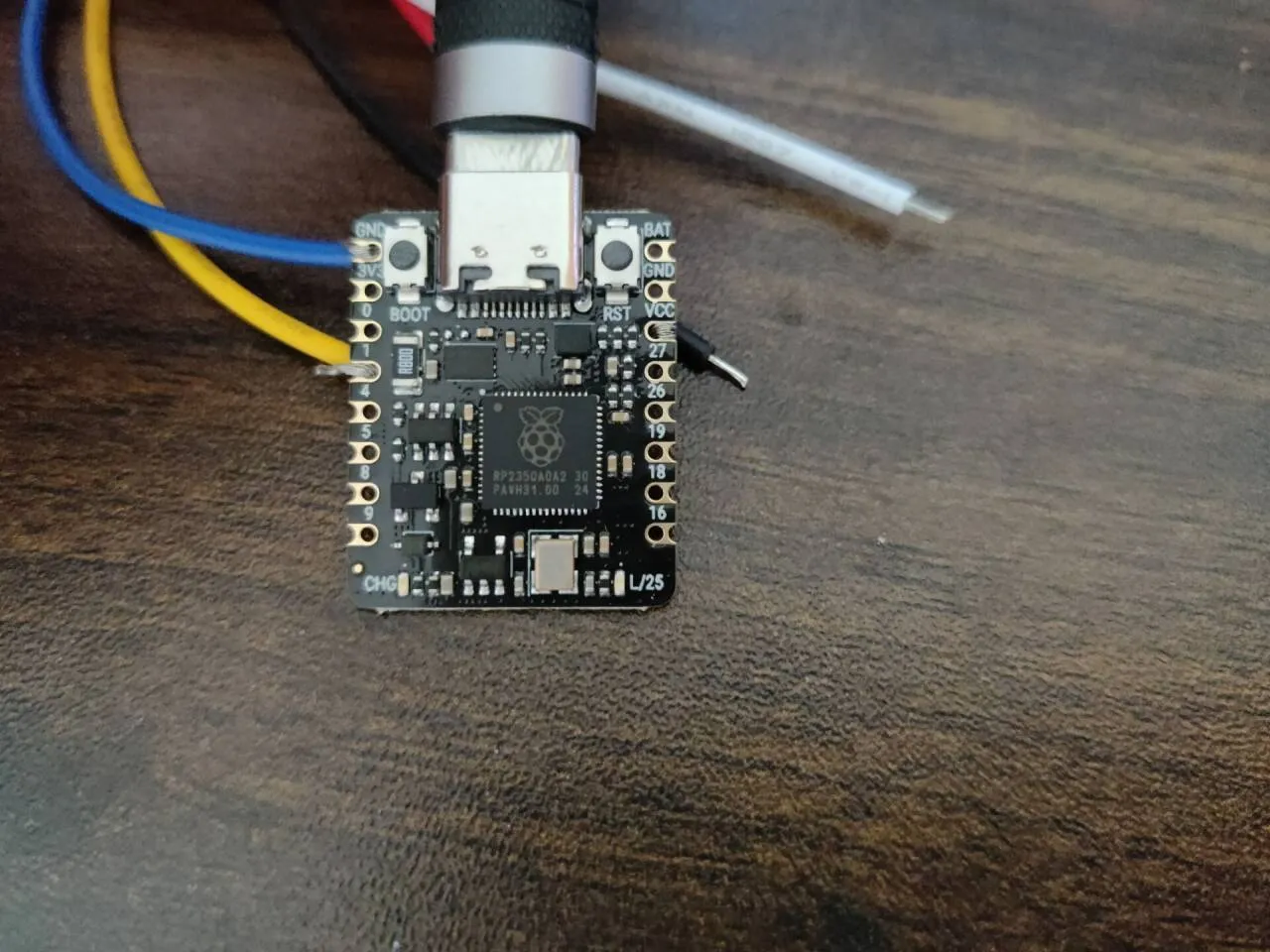
但是麻雀虽小五脏俱全,RP2350 的功能却是非常强大。如 双 Cortex-M33 核心,运行频率 150MHz,支持浮点运算单元 FPU,增强的安全性和加密功能,集成 RGB LED、2MB Flash、520kB SRAM 和 19 个多功能 GPIO(模拟、数字、I²C、UART、SPI、PWM。还有着相当低的功耗。 RP2350 可以直接在 arduino 中编写上传代码,也可以使用 micropy,我这里就使用 arduino 作为测试了!
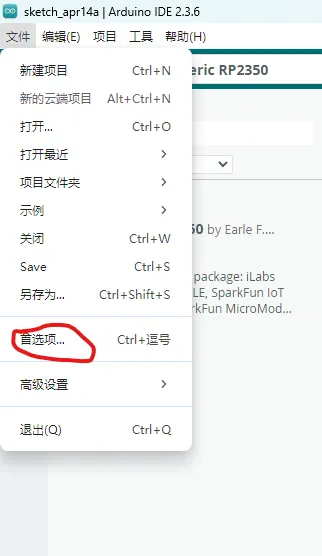
RP2350 没有官方的 arduino 库,所以我们需要手动添加社区大佬的库:
点击文件 → 首选项
 在其他开发板管理器地址中输入https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
在其他开发板管理器地址中输入https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
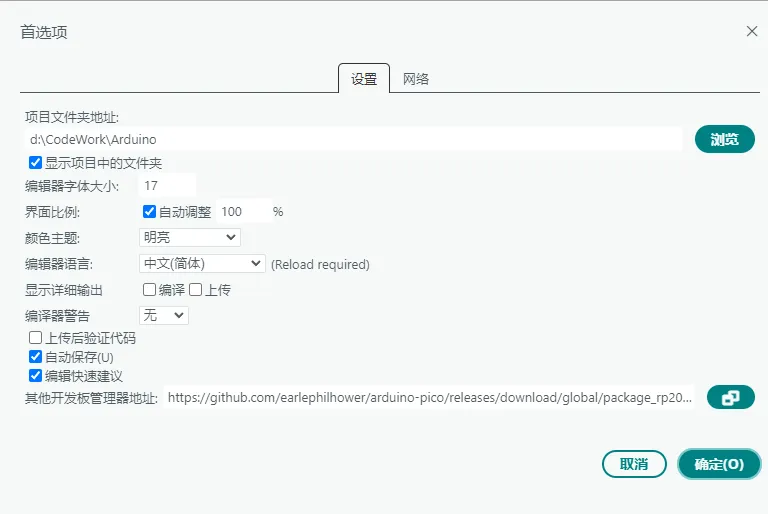
然后就可以在开发板管理器中搜到 RP2350 了!我们点击安装!

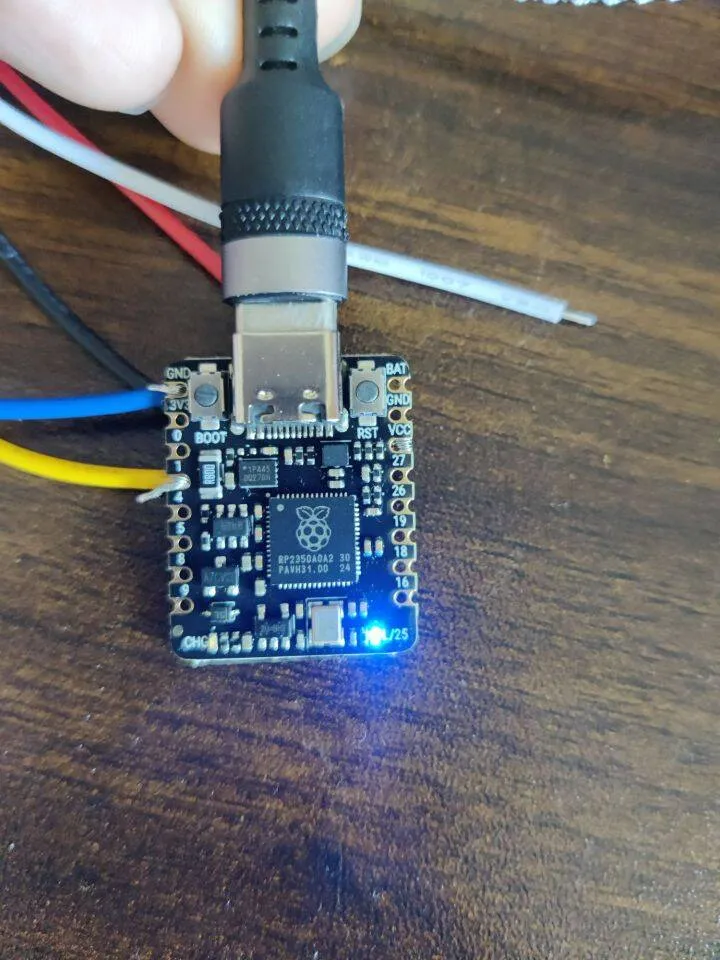
到手第一件事当然是点灯测试:
int useBin = 25;
void setup() {
pinMode(useBin, OUTPUT);
}
不得不说这块板子不仅迷你,标注也很清晰,一眼就能看到 LED 的引脚编号
然后是串口测试:
int usePin = A0;
void setup() {
Serial.begin(9600);
}
void loop() {
String a = Serial.readString();
a.trim();
if(a.equals("")){
return;
}
Serial.println("user input:"+a);
if (a.startsWith("hello")) {
Serial.println("hi");
} else {
Serial.println("???");
}
}
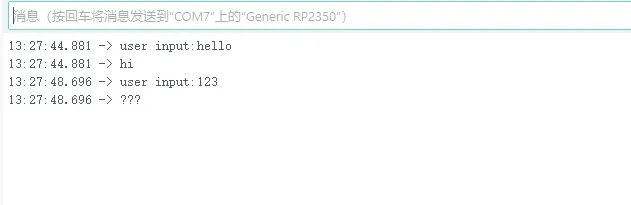 也是十分顺利了。
也是十分顺利了。
最后是重点:VR 手套的实现: 基于大佬的开源项目:https://github.com/LucidVR/lucidgloves 原理是通过线缆拉动电位器实现电阻变化,封装为数据包,通过串口与 pc 交互,实现 vr 手套。
项目实现需要自己 3d 打印组件,去 tb 上双手还是比较贵的,要 160 左右,有打印机的朋友推荐自己打,打印件地址位于:https://pan.baidu.com/s/13fnd0DoCyKVVMZP_ibvFpA?pwd=4h4x

其实这里应当是每根手指都有一个的,有个滑轮顶盖商家看错了打少了,只打了一个,就是下面这个: 这两天还在加紧补发呢,等到了之后会及时更新的!暂时就只能先演示一根手指的了
这两天还在加紧补发呢,等到了之后会及时更新的!暂时就只能先演示一根手指的了
其他打印件:
项目原本是基于 arduino nano 的,所以要在咱们的 2350 上运行需要做一点小小的修改(主要是引脚)。项目有一定复杂度(不算很复杂)这里就只贴部分需要修改的代码了: 在 lucidgloves-firmware.ino 中: 将下方的引脚定义添加一个 elif 修改为你需要的引脚,我这里只设置了拇指为 26。其他的力反馈,摇杆,可以根据自身情况修改
#elif defined(ARDUINO_GENERIC_RP2350)
#define PIN_PINKY 1
#define PIN_RING 1
#define PIN_MIDDLE 1
#define PIN_INDEX 1
#define PIN_THUMB 26
#define PIN_JOY_X 16
#define PIN_JOY_Y 18
#define PIN_JOY_BTN 19
#define PIN_A_BTN 19
#define PIN_B_BTN 19
#define PIN_TRIG_BTN 19 //unused if gesture set
#define PIN_GRAB_BTN 19 //unused if gesture set
#define PIN_PNCH_BTN 19 //unused if gesture set
#define PIN_CALIB 19 //button for recalibration
#define DEBUG_LED LED_BUILTIN
#define PIN_PINKY_MOTOR 19 //used for force feedback
#define PIN_RING_MOTOR 19 //^
#define PIN_MIDDLE_MOTOR 19 //^
#define PIN_INDEX_MOTOR 19 //^
#define PIN_THUMB_MOTOR 19 //^
#define PIN_MENU_BTN 19
#endif然后是 AdvancedConfig.h 中,需要手动设置最大模拟值,取消这行注释并自己设置一个值。
#define ANALOG_MAX 1023遗憾的是,2350 只支持 4 个模拟引脚。但它真的非常迷你,很喜欢的一款开发板!